
Fully-active suspensions (full-bandwidth active suspensions)
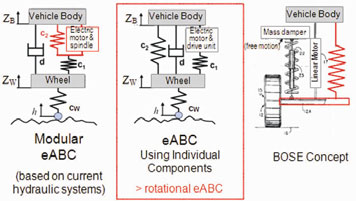
Fully-active suspensions: the difference between slow and fully-active suspensions is in terms of bandwidth. The fully-active actuator is able to react in milliseconds (bandwidth of 20–30Hz). As in slow-active suspension systems, the control variable is the suspension force F. Interestingly enough, the available bandwidth is the same as semi-active suspensions. However since the controllability range is beyond the passivity constraint, the overall power request is relatively high-demanding, around tens of kilo-Watts. (Source: Semi-Active Suspension Control Design for Vehicles)
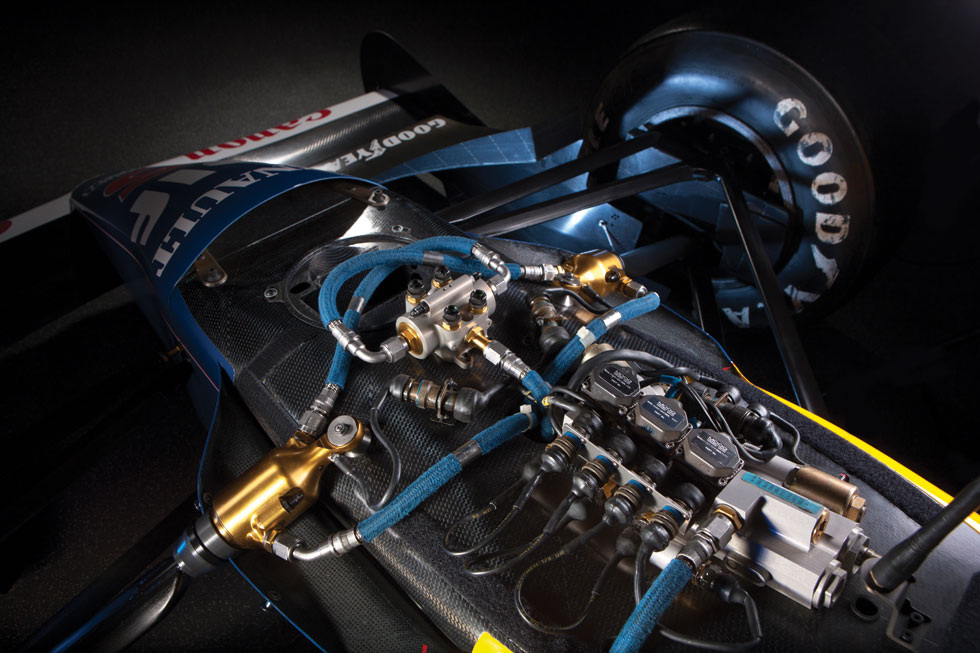
Williams reactive / active suspension in F1
When Lotus and others were starting to develop active suspension. They needed responsive, lightweight control systems to retain a consistent ride height. The precise control, flexibility and ‘power density’ of hydraulics – rather than electrical alternatives – resulted in widespread adoption, ultimately controlling the braking, steering, engine and gearbox.

This system allowed infinitely variable control of vehicle pitch, roll, ride height as well as spring and damper characteristics.
This allowed the car to maintain a level attitude, reducing aerodynamic drag under acceleration. Handling was also enhanced, as it was possible to reduce or eliminate roll and the suspension characteristics were able to adapt to the track conditions. In practice a significant amount of engine power was required to power the hydraulics. (Source: Moog)



